
Lý Giải Vì Sao UTOUR AI Là một Camera Chống Va Chạm Mà Không Phải Là Camera Hành Trình.
Giải thích từ góc nhìn kỹ thuật vì sao nó được gọi là một Camera Ai Cảnh báo Va Chạm, thay vì là một Camera hành trình.
Camera Ai Cảnh báo Va Chạm là một hệ thống ghi lại + thuật toán ADAS?
KHÔNG KHÔNG KHÔNG
+ Camera Ai Cảnh báo Va Chạm UTOUR AI là Camera hành trình ADAS?
Điều này hoàn toàn sai.
+ Hôm nay chúng ta sẽ nói về những điểm kỹ thuật chính của camera chống va chạm từ các góc nhìn về nguyên lý thuật toán và logic, lựa chọn phần cứng, cài đặt phần mềm và kiểm tra.
Đây sẽ là một loạt bài giải thích. Bài viết này trước tiên sẽ nói về Camera Ai Cảnh báo Va Chạm phía trước quan trọng nhất và cơ bản nhất.
Nguyên lý:
Giới thiệu về chức năng Cảnh báo va chạm phía trước, sản phẩm của chúng tôi được chia thành ba chức năng FCW, UFCW và VB cho các tình huống khác nhau, Cảnh báo Va Chạm khẩn cấp, Cảnh báo Va Chạm di chuyển chậm và chắn ảo (virtual bumper).
Ở đây, chúng tôi phân biệt theo tốc độ của phương tiện:
- FCW dành cho tốc độ trên 40km/h
- UFCW nhằm mục tiêu tốc độ từ 10-40km/h
- VB nhằm mục tiêu tốc độ từ 1-15km/h
VB được định hướng cho tốc độ từ 1-15km/h (trong ứng dụng, chúng tôi không hiển thị riêng biệt của VB, mà kết hợp với UFCW)
Có người hỏi, tại sao việc đánh giá tình huống của xe phía trước lại phức tạp như vậy? Thực tế, điều này chủ yếu do rủi ro và thiệt hại của ba tình huống và môi trường bên ngoài khác nhau. Ví dụ, khi tốc độ của xe cao, sự va chạm gây ra sẽ lớn, và khoảng cách phanh cũng sẽ tăng theo, không phải là một mối tương quan tuyến tính, tương tự như một hàm mảnh khúc trong toán học cấp 2. Giá trị tham số thay đổi theo cách khác nhau.
Nhiều người dùng sẽ đặt câu hỏi, còn bao xa để nhắc nhở FCW? Nói chung, tôi chỉ có thể nói rằng đây không phải là một vấn đề khoảng cách thuần túy, mà là một giá trị dự đoán. Chuyên nghiệp, nó được gọi là TTC (Thời gian đến va chạm), có nghĩa là khi tốc độ tương đối không bằng không, sử dụng công thức để tính thời gian từ va chạm đến hai xe đi trên cùng một đường, giả sử tốc độ tương đối không thay đổi.
Như đã giải thích trong sách vật lý, công thức tính thời gian va chạm là:
TTC = khoảng cách tương đối / tốc độ tương đối trung bình
Sau đó, hãy xem xét thời gian phản ứng của người dùng, tải trọng của phương tiện và khoảng cách phanh một cách toàn diện để tính toán ngưỡng ước tính. Do đó, đây không phải là một đánh giá khoảng cách đơn giản, mặc dù đánh giá khoảng cách là điều quan trọng nhất và cơ bản nhất. Theo quy định và tiêu chuẩn quốc gia tại Châu Á, TTC chung là 2,7 giây và cần phát ra cảnh báo, bởi vì cần thời gian cho tốc độ phản ứng của con người và khoảng cách phanh của xe.
Tất nhiên, trong việc sử dụng thực tế, chúng tôi cũng sẽ xem xét tăng tốc (ví dụ như đạp ga chắc chắn nguy hiểm hơn), và giới thiệu khái niệm ETTC, công thức tính toán của ETTC sẽ phức tạp hơn và liên quan đến tích phân. Nhưng nguyên tắc chung là công thức này, và chúng tôi sẽ gọi nó là TTC để hiểu nó một cách đơn giản hơn.
Từ các thông số của khoảng cách phanh, tốt nhất là tính toán va chạm chống lại theo từng phần theo tốc độ của xe, đặc biệt là trong giai đoạn VB cuối cùng, tốc độ của xe cơ bản rất nhỏ và khoảng cách phanh rất nhỏ. Lúc này, tốc độ có thể bị bỏ qua vì mẫu số quá nhỏ. TTC tính toán cũng không chính xác. Đủ để chỉ dựa vào tính toán khoảng cách của xe để quyết định có phát ra cảnh báo sớm hay không. Từ thời gian phản ứng của người dùng, các thông số trạng thái của xe phụ thuộc vào cài đặt độ nhạy của người dùng.
Có thể thấy từ công thức rằng nó phụ thuộc vào khoảng cách. Đối với tính toán khoảng cách, tham khảo bài viết này, tốc độ xe, phản ứng của người dùng và khoảng cách phanh.
Ở đây chỉ giới thiệu ngắn gọn về nguyên lý hoạt động cơ bản, nguyên lý sâu hơn có thể tham khảo bài viết này.
Phần cứng :
Đối với công thức này, hãy nói về phần cứng trước.
Khoảng cách phụ thuộc vào tầm nhìn, tức là camera, tốc độ phụ thuộc vào GPS và IMU, và tốc độ phản ứng và khoảng cách phanh là chủ quan, được cung cấp bởi giá trị kinh nghiệm và thông số người dùng.
Công thức dự đoán ở đây được tính toán theo thời gian thực dựa trên trạng tái hiện tại mỗi lần, chẳng hạn như xem xét xem phương tiện phía trước có giảm tốc độ, phương tiện có đang tăng tốc độ hay giảm tốc độ, và môi trường bên ngoài đang thay đổi nhanh chóng, vì vậy nó rất phụ thuộc vào hiệu suất thời gian thực:
1. Hiệu suất thời gian thực của dữ liệu camera.
2.Tính toán
3.Hiệu suất thời gian thực của tốc độ phương tiện.
Thời gian thực ở đây yêu cầu đạt đến mức mili giây, vì nếu tích lũy quá nhiều độ trễ, người dùng sẽ không có thời gian phản ứng và cảnh báo sớm sẽ không có ý nghĩa.
Hiệu suất thời gian thực rất phụ thuộc vào phần cứng.
1. NPU
Camera tính toán khoảng cách. Điều quan trọng nhất ở đây là độ chính xác của mô hình. Việc nhận dạng của chính chiếc xe phải chính xác. Kể từ năm 2016, sự phát triển nhanh chóng của trí tuệ nhân tạo (AI)(Deep Learning) đã tăng cường đáng kể khả năng nhận dạng mục tiêu của máy tính. Phát triển này có thể nói là thay đổi từng ngày.
Điều quan trọng nhất đối với nhận dạng mục tiêu là tốc độ tính toán. Ở đây, chúng tôi muốn phổ biến sự khác biệt giữa NPU và CPU. CPU truyền thống xử lý tính toán logic, trong khi NPU là một đơn vị tính toán được thiết kế đặc biệt cho trí tuệ nhân tạo (AI)(Deep Learning). Nó có thể được so sánh với GPU. Trước đây, các card đồ họa máy tính đều có cấu hình GPU. Những cái chuyên về hiển thị hình ảnh và kết xuất là các đơn vị tính toán chuyên dụng nhanh hơn nhiều lần.
Ví dụ, hãy lấy vi mạch C2M của chúng tôi làm ví dụ, sức mạnh tính toán thực tế của NPU là 0.8TOPS, và CPU là A53 1.2G hai nhân (đây là cấu hình cao nhất của một bộ ghi âm thông thường).
Nhưng nếu chúng ta chỉ xem xét so sánh sức mạnh tính toán,
0.8TOPS = 800 tỷ phép tính mỗi giây
CPU=1.2*10242*1000000 = 2457600000=2.4 tỷ lần chỉ thị mỗi giây
Do đó, về mặt sức mạnh tính toán AI, sự khác biệt giữa hai cái này là 333 lần. NPU có thể tính toán trong 10ms, trong khi CPU mất 3.33 giây. Vì vậy, tính toán CPU gần như không đáng kể.
Đây là nơi mà tài xế có kinh nghiệm cần cập nhật nhận thức của mình:
Nhìn vào lịch sử phát triển của trí tuệ nhân tạo (AI)(Deep Learning), có thể thấy rằng trí tuệ nhân tạo (AI)(Deep Learning) bắt đầu phát triển mạnh mẽ vào năm 2018, và ban đầu chủ yếu là ở mặt công nghiệp và máy chủ. Tuy nhiên, do sự sản xuất hàng loạt của vi mạch, tính hiệu quả về giá cả và vấn đề nhiệt, thị trường tiêu dùng sẽ không bắt đầu được áp dụng cho đến năm 2020. Nếu ai đó nói rằng ADAS trước đó là rác rưởi, điều này là đúng, vì ngăn xếp công nghệ hoàn toàn khác nhau.
Có thể nói rằng lĩnh vực hàng tiêu dùng chỉ mới bước vào giai đoạn trưởng thành ở hiện tại. Hai năm qua đã trưởng thành, chẳng hạn như máy quét và sách ảnh, tất cả đều được kích hoạt bởi làn sóng công nghệ này.
Vì vậy, ở đây chúng ta cần cập nhật nhận thức và khái niệm của mình. Chỉ có ADAS mới nhất với đơn vị NPU mới đáng tin cậy. Nếu chúng ta chỉ ngăn xếp CPU, thì không thể làm tốt trong các sản phẩm tiêu dùng.
2. GPS Speed
Trước đây, chỉ cần thiết bị thu thập bằng chứng, máy ghi âm đã được trang bị GPS, nhưng GPS được sử dụng cho thuật toán rất khác với GPS của máy ghi âm thông thường. Đối với máy ghi âm thông thường, GPS chỉ có thể có tốc độ của phương tiện tại thời điểm đó, và tính thời gian thực không nhạy, cấu hình cơ bản là 1HZ, tức là 1 lần mỗi giây.
Thuật toán canh bao va chạm yêu cầu mili giây, và thông thường cần được cấu hình với 10HZ, tức là báo cáo và cập nhật mỗi 100ms. Việc báo cáo thời gian thực về thay đổi tốc độ của phương tiện rất hữu ích cho thuật toán. Giống như nhiều xe hơi hiện nay, tăng tốc rất nhanh, và tất cả đều vượt quá 100 trong 6 giây. Tốc độ có thể là 15km/h trong 1 giây, và khác biệt chỉ là 1km/h trong 100ms. Đối với thuật toán, 10HZ là đủ, và 1HZ cơ bản không thể đáp ứng yêu cầu thời gian thực.
3. IMU
IMU là Cảm biến góc quay + cảm biến gia tốc. Máy ghi truyền thống thường được gọi là G-Sensor. Máy ghi chủ yếu được sử dụng để tích hợp video vào video khẩn cấp sau va chạm. Thông thường, 3 trục là đủ. Đối với thuật toán, thông thường sử dụng 6 trục, tại sao? Có 3 giá trị gia tốc góc nữa trên 6 trục, điều này có nghĩa là trên một số dốc, chẳng hạn như đường dốc, tính toán tốc độ xe cộ chính xác hơn (tính toán tốc độ xe cộ GPS phụ thuộc vào dữ liệu tọa độ vệ tinh, và độ chính xác tọa độ theo chiều cao không đủ, chỉ có hệ thống ngang của vĩ độ và kinh độ, không thể tính toán tốc độ trên dốc), 6 trục có thể tính toán chính xác hơn.
Ngoài ra, có một độ trễ nhất định trong tốc độ xe cộ GPS, cần được sửa đổi bằng công nghệ IMU để cải thiện hiệu suất thời gian thực của tốc độ xe cộ.
Nói chung, về phần cứng, Camera Ai chống va chạm chủ yếu phụ thuộc vào những khía cạnh sau đây: camera, NPU, GPS và IMU. Nếu một sản phẩm không làm việc chăm chỉ trên phần cứng, và sau đó quảng cáo rằng nó hỗ trợ cảnh báo chống va chạm, bạn sẽ có lý do vững chắc để nghi ngờ tính đáng tin cậy của họ.
Cài đặt phần mềm:
Về nguyên tắc, bạn có thể thấy rằng việc dự đoán va chạm phụ thuộc vào khoảng cách phanh của xe người dùng và tốc độ phản ứng của người dùng. Những điều này thực sự vượt quá tính toán của thuật toán. Chúng phụ thuộc vào người dùng và hiệu suất của chính chiếc xe. Chúng ta chỉ có thể dựa vào một lượng lớn dữ liệu tích lũy và cung cấp một giá trị kinh nghiệm. Trên thực tế, dữ liệu này thay đổi rất rộng. Cuối cùng, chúng tôi mở nó lên cho người dùng để thiết lập và cung cấp một tham số nhạy cảm. Tham số này thực sự phụ thuộc vào sự đánh giá của người dùng. Nếu lời nhắc không đủ kịp thời, hãy thiết lập nó cao hơn. Nếu cảm thấy cảnh báo quá nhanh và quá nhiều, hãy thiết lập giá trị nhạy cảm thấp hơn.
Hình ảnh hiển thị cài đặt phần mềm của APP UTOUR GO.
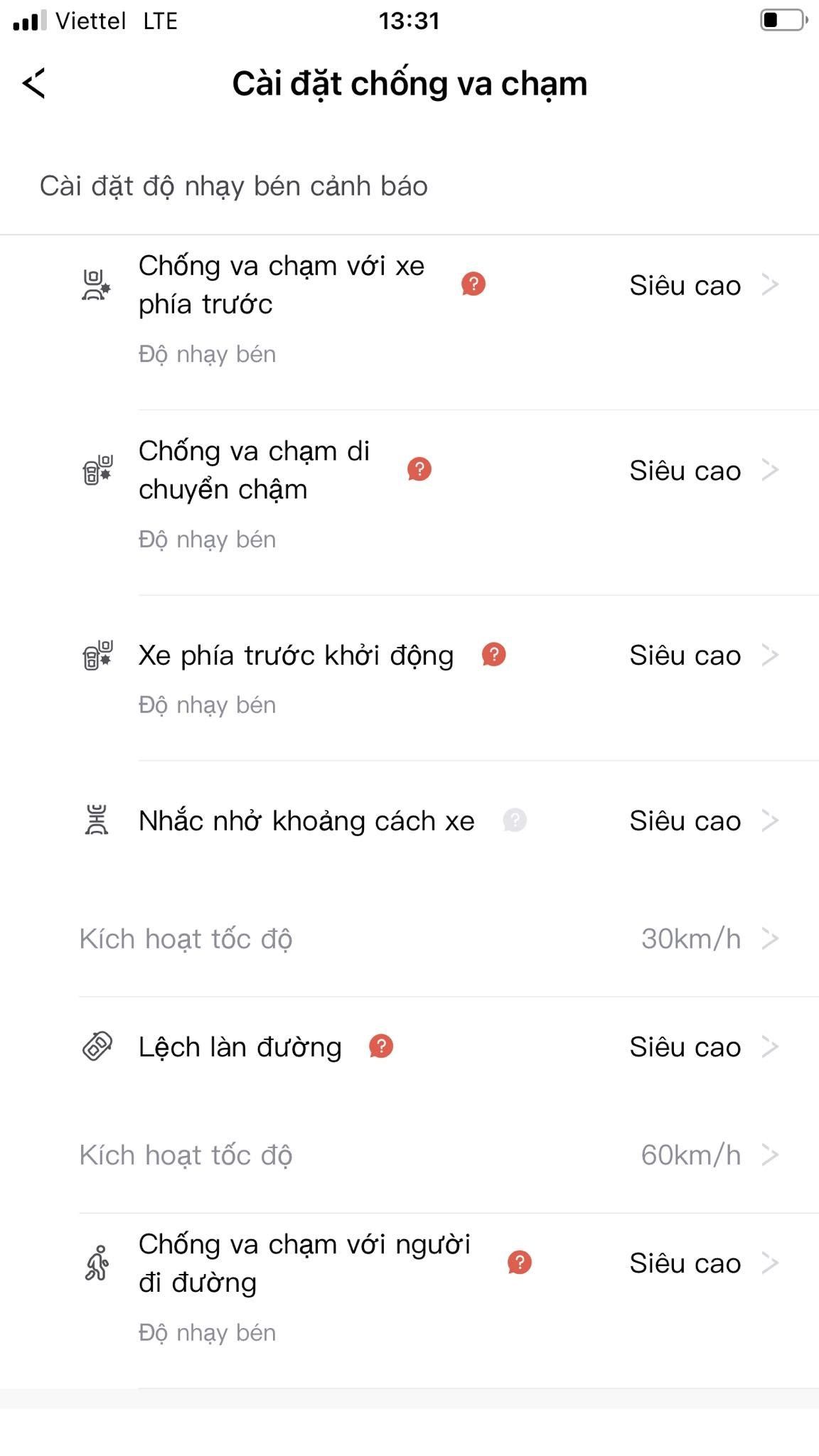
Các thông số này và các thông số liên quan đến cài đặt sau đây cần được điều chỉnh linh hoạt bởi mỗi người dùng tùy theo điều kiện xe của họ.
Trong số đó, tham số độ nhạy của chống va chạm cần được giải thích.
- Độ nhạy của FCW và UFCW là để thiết lập ngưỡng ETTC cho cảnh báo sớm.
- Độ nhạy của VB là khoảng cách để đặt cảnh báo (nếu xe nằm trong một khoảng cách nhất định so với xe phía trước, nó sẽ phát ra cảnh báo nếu có hành động tiếp cận).
Trên thực tế, để đơn giản hóa việc người dùng hiểu, các thiết lập của UFCW và VB được kết hợp trên ứng dụng chỉ để lại UFCW.
.jpg)
Ở đây, tôi muốn bổ sung một số điểm: Nhiều sản phẩm trong ngành Camera hành trình sẽ nói rằng chúng hỗ trợ ADAS và FCW, nhưng chỉ có UTOUR dám kích hoạt chức năng ADAS mặc định trong cài đặt ứng dụng và hướng dẫn người dùng thiết lập tham số một cách chủ động. Ngược lại, điều này cho thấy các thương hiệu cạnh tranh không tự tin vào chức năng này. Đồng thời, chỉ có UTOUR cung cấp các thiết lập tùy chỉnh cá nhân trên màn hình ứng dụng, thể hiện đầy đủ sự chuyên nghiệp của UTOUR.
Bài kiểm tra thực tế:
Theo ý kiến của tôi, kiểm tra tính năng va chạm là điều quan trọng nhất.
Kiểm tra liên quan đến trải nghiệm người dùng. Thực tế, có một số chỉ số kiểm tra quan trọng.
- Tỷ lệ báo cáo thiếu sót, chỉ ra rằng nó nên phát ra cảnh báo, nhưng thực tế không phát ra.
- Tỷ lệ báo động sai, có nghĩa là báo cáo không nên được báo cáo nhưng thực tế lại được báo cáo. Điều này thực sự rất quan trọng, vì nếu có quá nhiều báo động sai, người dùng sẽ không quan tâm đến cảnh báo nữa, và khi cảnh báo thực sự xảy ra, người dùng sẽ bỏ qua nó, làm cho cảnh báo trở nên vô dụng.
- Độ trễ, điều này cũng rất quan trọng. Khi độ trễ quá cao, phương tiện đã va chạm, vì vậy cảnh báo là không cần thiết và không có ý nghĩa.
Ba chỉ số kiểm tra này thực sự liên quan đến nhau. Nếu tỷ lệ cảnh báo bị thiếu thấp hoặc độ trễ thấp, có thể xảy ra báo động sai. Nếu giảm báo động sai, tỷ lệ cảnh báo bị thiếu và độ trễ cũng sẽ tăng lên. Sự cân bằng và kinh nghiệm ở giữa cần được kiểm tra đi kiểm tra lại dựa trên thống kê. Tỷ lệ độ chính xác của chúng tôi được đảm bảo ít nhất là trên 95%.
Nhìn vào bài kiểm tra từ góc độ thống kê:
Tiêu chuẩn đo lường của thuật toán dựa trên tiêu chuẩn ý nghĩa thống kê, không phải là logic chương trình truyền thống, hoặc có hay không, và chỉ cần kiểm tra cơ bản một lần. Thuật toán bắt đầu ít nhất 10 lần, và nếu nó xuất hiện trong 10 lần, nhiều điều chỉnh quan trọng cần được kiểm tra 100 lần để xem xác suất xảy ra.Xác suất thống kê có nghĩa là tỷ lệ chính xác không thể dựa trên một lần kích hoạt kiểm tra duy nhất. Ví dụ, nếu lần này kích hoạt, thì ok, nhưng nếu lần này không kích hoạt, thì không ok. Mọi thứ nên được đưa vào một mẫu lặp lại để xem vấn đề.
Từ góc nhìn kịch bản, chúng ta thực hiện kiểm tra:
Cảnh lái xe rất phức tạp. Thời tiết như mưa, ban đêm, điều kiện đường như đường hầm, đường dốc và đường xuống, đường cong, làn đường, và sau đó là tốc độ của phương tiện chính nó, tăng tốc và giảm tốc, và tăng tốc và giảm tốc của các xe khác đều là những yếu tố ảnh hưởng đến hiệu suất của thuật toán. Nó phụ thuộc vào việc mỗi cảnh cần được kiểm tra ở một nơi cố định. Về vấn đề này, chúng tôi đã có các vị trí cố định để đề ra các tiêu chuẩn kiểm tra, và các con đường cơ bản trong vùng Đồng Bằng Sông Cửu Long đã được đi qua hết.
Và mỗi trường hợp sử dụng trên phải được lặp lại trong mỗi tình huống. Hãy nghĩ về lượng công việc này. Trí tuệ nhân tạo, trước hết, thực sự là nhân tạo (Lao động thủ công).
Từ góc độ kiểm tra rủi ro:
Cuộc kiểm tra cảnh báo va chạm cũng rất nguy hiểm. Những người kiểm tra thường hoạt động ở giới hạn cực đoan. Nếu không có kỹ năng lái xe và khả năng phản ứng nhất định, tai nạn dễ xảy ra.
Phòng thử nghiệm của UTOUR có những người kiểm tra chuyên nghiệp, được trang bị xe thử nghiệm và tiêu chuẩn đánh giá đều đặn nghiêm ngặt, nhằm giảm thiểu tai nạn.
Do đó, ADAS thực sự đòi hỏi nhiều nguồn nhân lực và tài nguyên vật chất để thực hiện kiểm tra, vì mỗi phần cứng mới được phát triển cần được thích ứng và điều chỉnh cho thuật toán, điều này đòi hỏi nhiều công việc lặp lại để kiểm tra. Loại đầu tư này không phải là công ty giải pháp nhỏ hiện tại hoặc nhà máy OEM có thể đầu tư, và do đó không thể thực hiện kinh doanh OEM.
Chú ý đến tất cả các chi tiết
Để cải thiện trải nghiệm của người tiêu dùng, chúng tôi thực sự đã thực hiện nhiều tối ưu hóa trải nghiệm cho ADAS tiêu chuẩn. Dưới đây là một số ví dụ:
1, Lái xe ô tô ở những con đường bị kẹt xe.
Trong một môi trường kẹt xe, nếu đó là một Bumper ảo bình thường, vì mọi người không muốn người khác chen vào hàng, lúc này bạn chỉ có thể tiếp cận rất gần với xe phía trước, và môi trường kẹt xe có thể có tỷ lệ báo động giả cao. Trên thực tế, tốc độ rất thấp vào thời điểm này, và rủi ro không lớn. Vì vậy, trong trường hợp này, chúng tôi sẽ giới hạn cảnh báo. Ví dụ, chỉ có thể cảnh báo tối đa bốn lần cho phần đuôi của xe phía trước. Nếu vượt quá, sẽ không có cảnh báo nào được phát ra.
2, Hoạt động lái song song tự động.
Nếu bạn theo sau đuôi xe và chuyển làn, dễ dẫn đến kích hoạt cảnh báo, nhưng xem xét rằng vào thời điểm này, mọi người đang hoạt động và tập trung tương đối, hiệu quả của cảnh báo không cao. Lúc này, chúng tôi sẽ giảm độ nhạy của chống va chạm để tránh sự can thiệp.
3,Xe bên cạnh đột ngột chuyển làn vào làn đường của bạn.
Ngược lại với kịch bản trên, sự tập trung của người lái có thể không cao vào thời điểm này, vì đó là hành vi đột ngột của bên kia, có thể gây tai nạn. Để giảm tai nạn, thuật toán sẽ tăng độ nhạy của chống va chạm để nhạy hơn.
Do vấn đề về độ dài bài viết hạn chế, chúng tôi chỉ đề cập đến một số cảnh nhỏ trước tiên. Chúng tôi tối ưu hóa từ cảnh thực tế của người dùng và chỉ dành cho những trường hợp cần cảnh báo sớm, thuật toán sẽ tự động cảnh báo sớm và giảm thiểu sự can thiệp vào các thời điểm khác. Do đó, trong một số trường hợp, đôi khi người dùng tự ý thử nghiệm, nhưng có thể không kích hoạt cảnh báo sớm. Ví dụ, một số người dùng cố tình đạp ga để kiểm tra FCW. Lúc này, chúng tôi tin rằng đây là một hành vi tích cực và sẽ giảm độ nhạy.
Liên tục cập nhật (OTA)
Tất nhiên, chúng tôi nghĩ rằng chức năng chống va chạm của chúng tôi vẫn đang ở giai đoạn tối ưu, và vẫn còn nhiều khía cạnh cần cải thiện, như:
Giới hạn bởi kích thước mô hình và sức mạnh tính toán hạn chế, chỉ có một camera và không bao gồm mô hình bên hông của xe. Đôi khi bên hông của một chiếc xe buýt lớn lại đến rất gần, lúc này, thuật toán không thể nhận ra và sẽ không có cảnh báo.
Ngoài ra, khi làn đường không rõ ràng và có một đoạn cong, sự đánh giá của xe có thể không chính xác về khoảng cách và xe mục tiêu, và cảnh báo sớm sẽ không tốt hơn trong thời điểm này.
Cũng bị giới hạn bởi vị trí lắp đặt của camera, nếu phương tiện phía trước quá gần, camera không thể ghi lại phần dưới của phương tiện đó và khó để đánh giá khoảng cách chính xác đến radar. Ví dụ, trong khoảng 50cm, đánh giá là không chính xác.
Mọi tình huống đặc biệt có thể được tối ưu hóa từng bước thông qua tối ưu hóa phần mềm, nhằm cung cấp dịch vụ chính xác và an toàn hơn.
Ngoài các tình huống đã biết, còn có một số tình huống không biết trước, rất phụ thuộc vào phản hồi từ người dùng. Vì vậy, chúng tôi có một nhóm trải nghiệm người dùng thử nghiệm đặc biệt ở Trung Quốc để mọi người có thể đóng góp ý kiến và cung cấp mẫu tình huống. Trước đây, đã có phản hồi từ người dùng rằng khi đang đợi đèn đỏ, anh ta bận rộn nhìn điện thoại. Anh ta không nhận ra có người đứng trước xe khi khởi động và va vào người đó một cách tình cờ. Anh ta hy vọng điều này có thể cảnh báo sớm. Trong tương lai, chúng tôi sẽ từ từ cải thiện tình huống này. Cuối cùng, sản phẩm luôn luôn phát triển từng bước.