
Nguyên Lý Hoạt Động Của Thiết Bị Cảnh Báo Va Chạm UTOUR AI
Đây là một hệ thống hỗ trợ lái xe cao cấp (ADAS) dựa trên công nghệ trí tuệ nhân tạo (AI), có khả năng liên tục theo dõi các mục tiêu trên đường và cảnh báo nguy cơ va chạm trước 3 giây, được coi là "mắt thần" của tài xế.
Là một sản phẩm công nghệ cao mới, các chức năng mạnh mẽ của nó đã gợi sự tò mò của nhiều người. Hôm nay chúng tôi sẽ tiết lộ bí mật về Camera Cảnh Báo Va Chạm UTOUR AI và giới thiệu nguyên tắc hoạt động của nó cho bạn.
Quá trình hoạt động của AI Collision Avoidance Camera có thể chia thành bốn giai đoạn: Nhận thức (Perception), Nhận dạng (Identification), Ra quyết định (Decision Making), Cảnh báo (Warning).
Bước 1: Nhận thức(Perception)
Camera cảnh báo va chạm UTOUR AI sử dụng một camera kỹ thuật số HD trên xe với độ phân giải 4K để thu thập hình ảnh về tình trạng đường phía trước.
Bề ngoài của camera trông như thế này:

Cấu trúc bên trong của camera được hiển thị trong hình dưới đây:
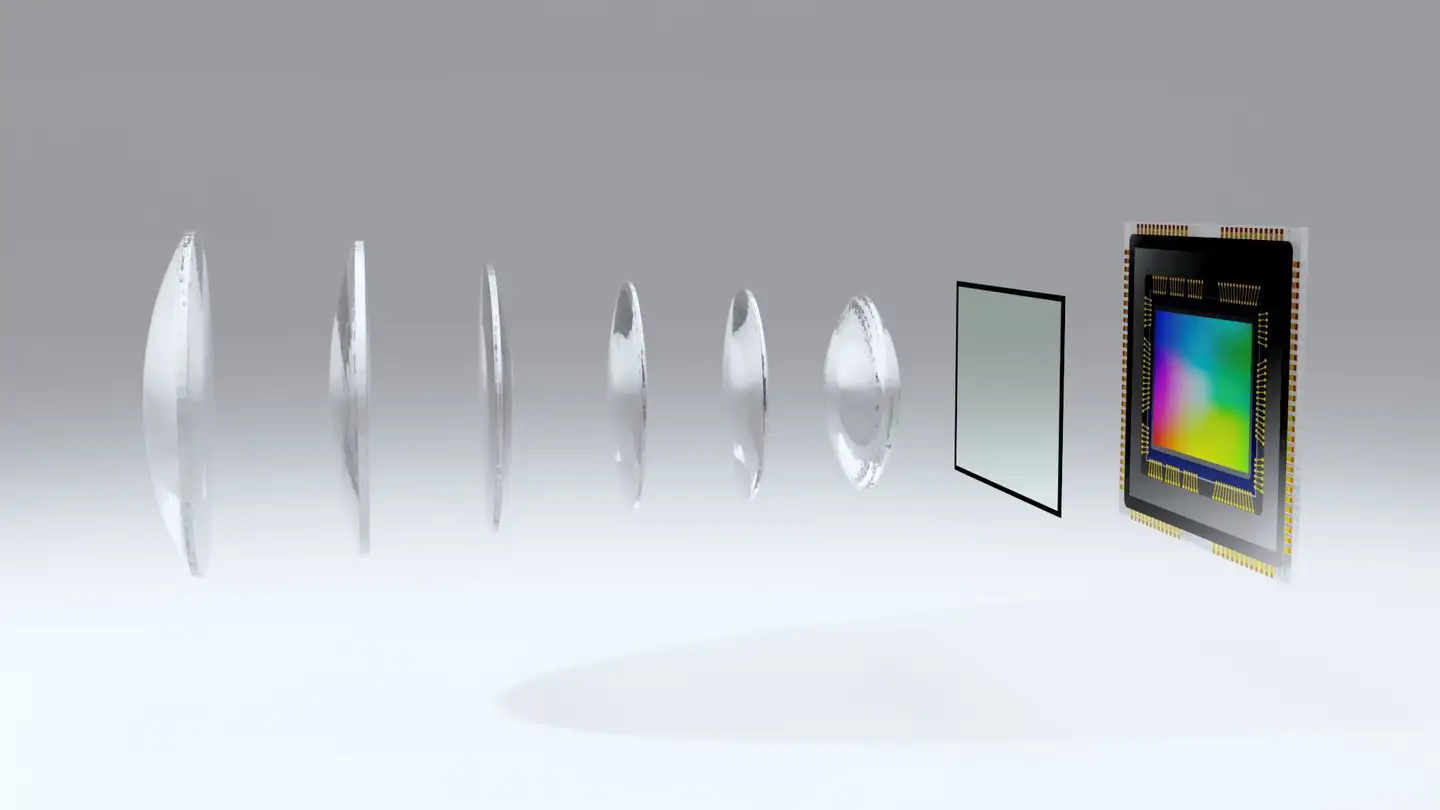
Phía trước là một nhóm ống kính được gia công chính xác, và phía sau là bộ lọc hồng ngoại và một yếu tố cảm biến hình ảnh CMOS độ phân giải cao.
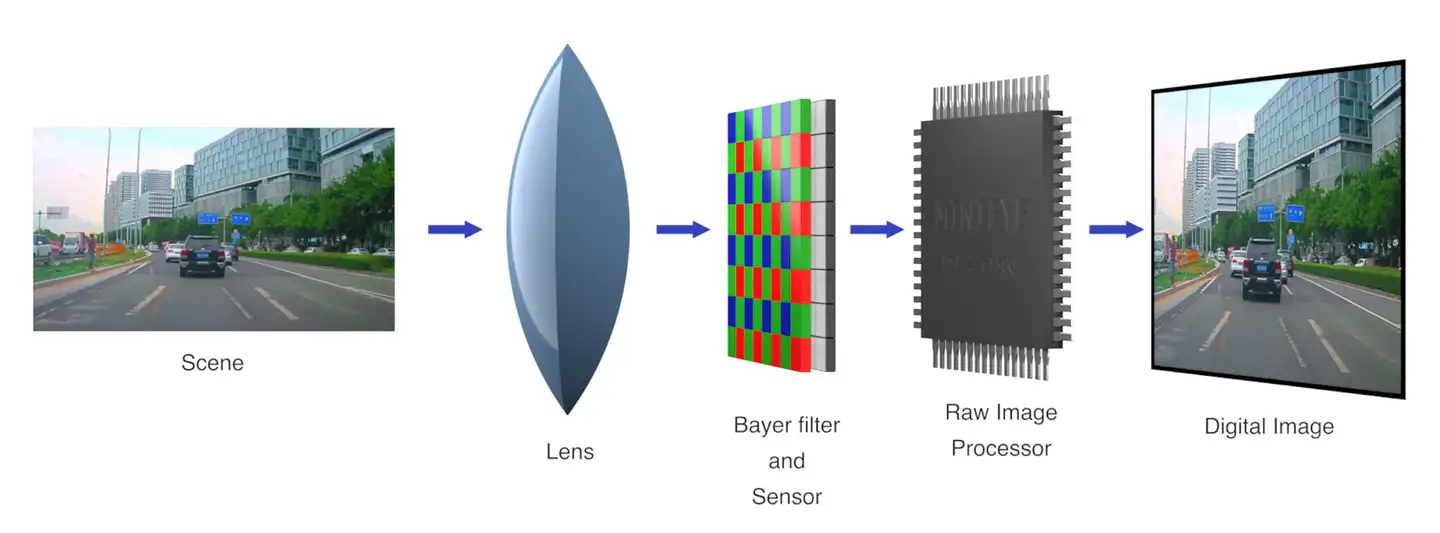
Ánh sáng phát ra và phản xạ từ tất cả các vật trong lĩnh vực quan sát được lắp kính lọc, chuyển đổi thành tín hiệu điện bởi yếu tố cảm biến hình ảnh CMOS, sau đó được xử lý bởi bộ xử lý hình ảnh RAW để khôi phục một hình ảnh số rõ nét để ghi video và tính toán sau này.
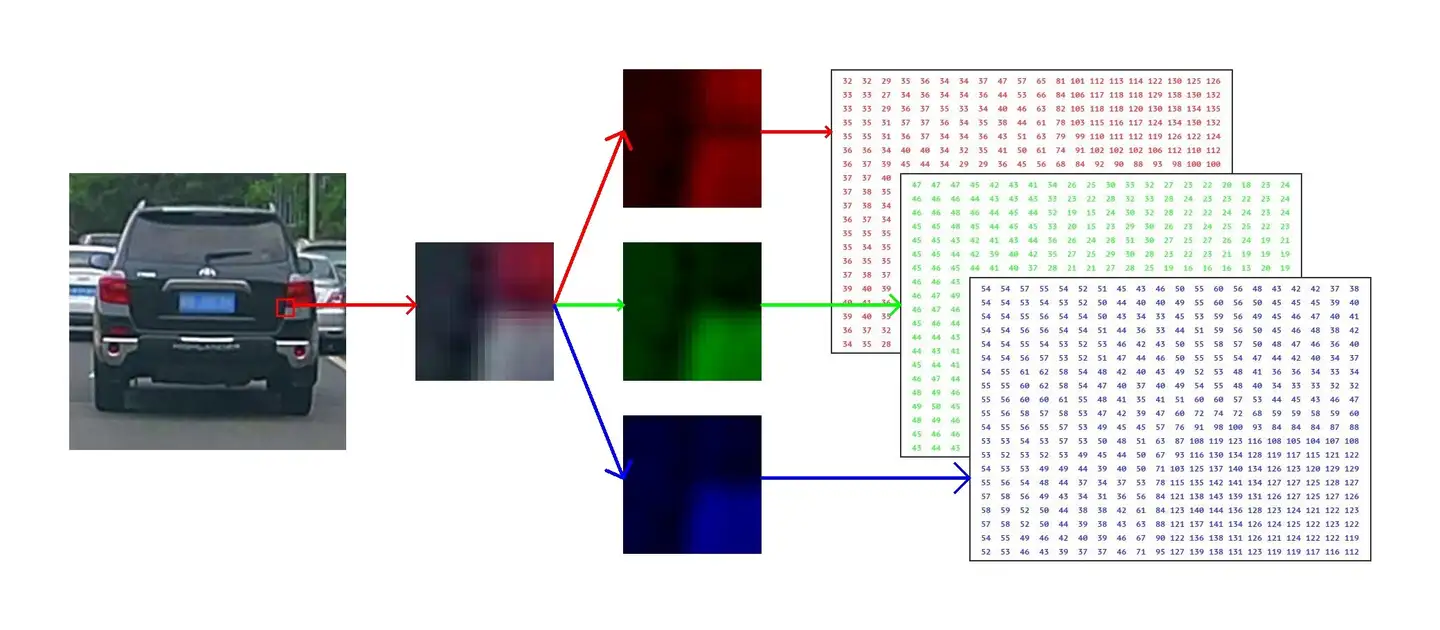
Mỗi khung hình ảnh chứa ba kênh màu đỏ, xanh lá cây và xanh dương, và thông tin pixel của mỗi kênh được mã hóa thành một mảng số học được sắp xếp gọn gàng giống như một bảng, để có thể được xử lý bởi máy tính.
Bước 2: Nhận dạng(Identification)
Máy cảnh báo va chạm UTOUR AI sử dụng Mạng nơ-ron tích chập (Convolutional Neural Network) để phát hiện, nhận dạng và phân loại các đối tượng trong hình ảnh.
Đưa thông tin hình ảnh số thu thập được trong bước đầu tiên vào mạng nơ-ron tích chập:
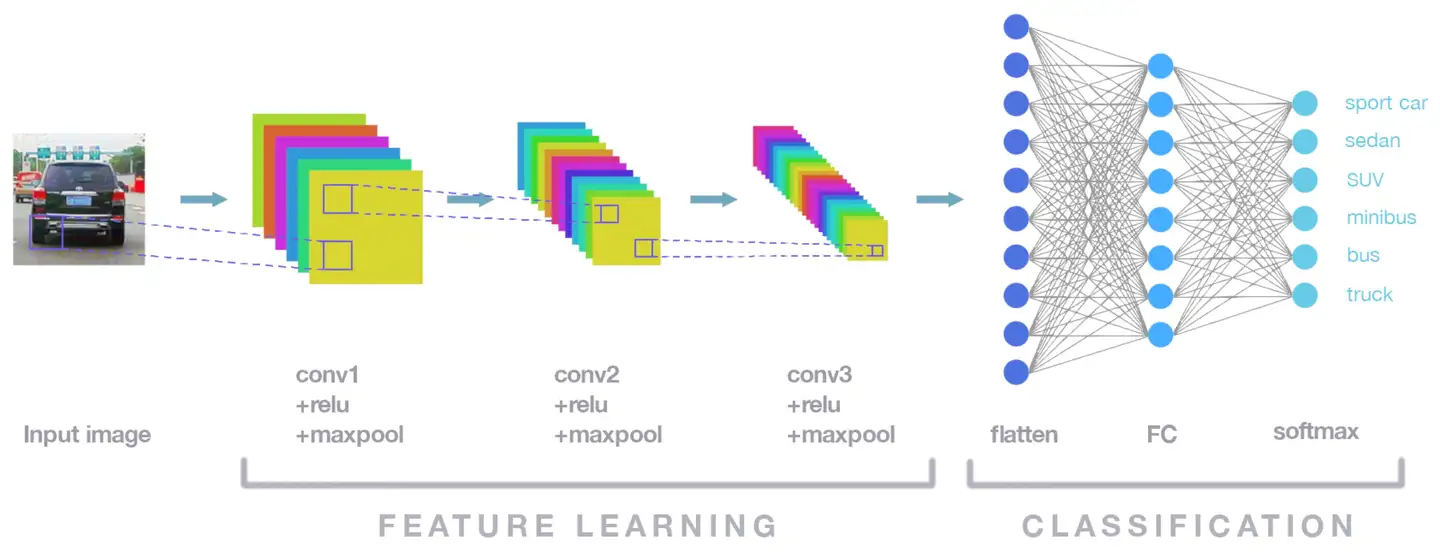
Mạng nơ-ron tích chập trích xuất các đặc trưng hữu ích từ hình ảnh thông qua các phép tích chập từng tầng:
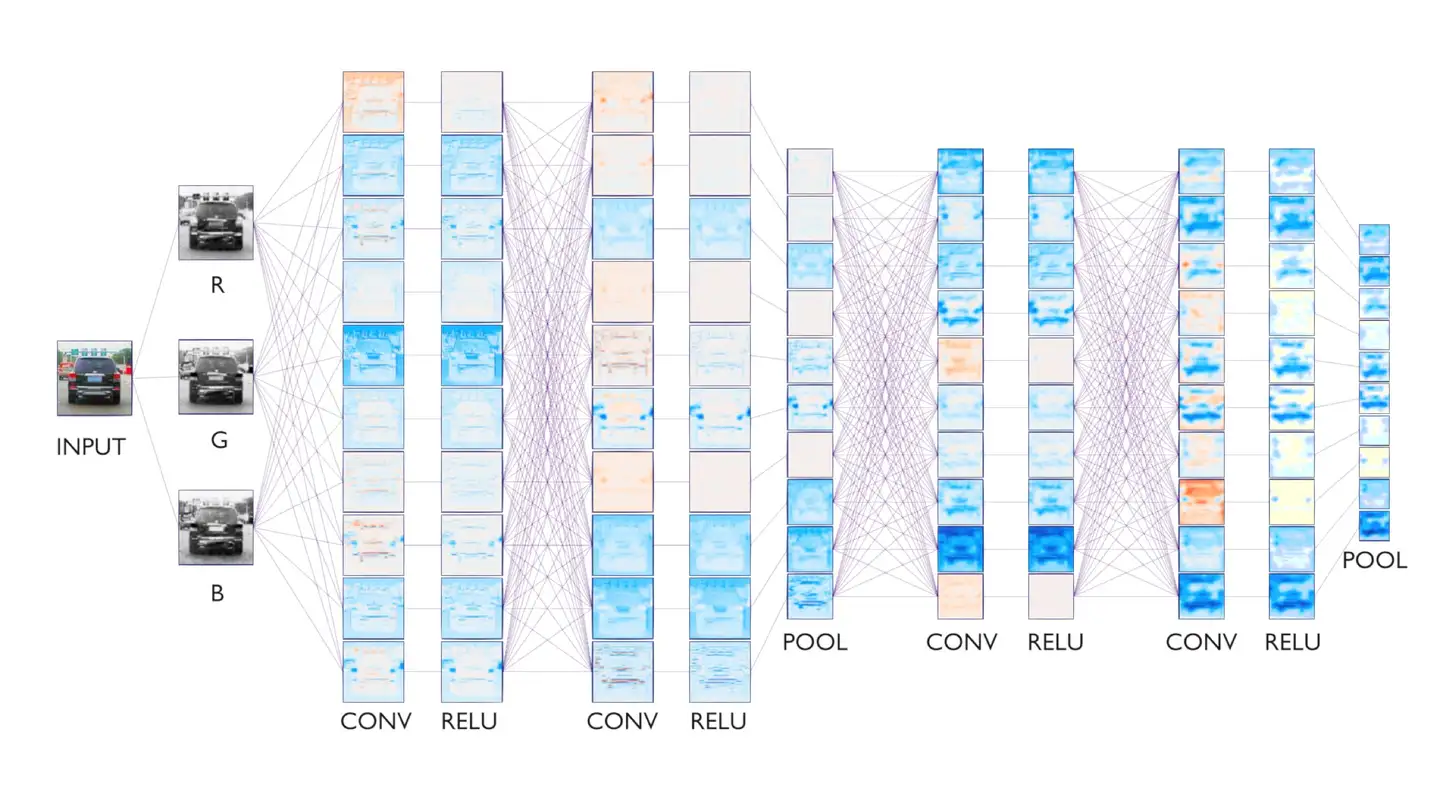
Những tính năng này bao gồm đường viền đối tượng, đường viền cạnh, hình học, phân bố ánh sáng và bóng, v.v. Bằng cách kết hợp những tính năng này, ta có thể xác định loại đối tượng là gì, chẳng hạn như ô tô, xe buýt hoặc người đi bộ.

Tiếp theo, đối với mỗi đối tượng được xác định, nguyên lý hình học chiếu được sử dụng để tính toán ngược lại khoảng cách của chúng.
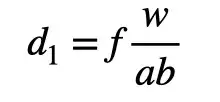
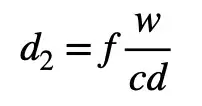
Chúng ta biết rằng trong bức ảnh chụp bởi máy ảnh, đối tượng sẽ hiển thị hiện tượng "gần to xa nhỏ", còn được gọi là "góc nhìn". Các quy luật toán học bên trong được hiển thị trong hình dưới đây:

Giả sử tiêu cự của ống kính là f, chiều rộng của ô tô AB = CD = w; khoảng cách từ ô tô 1 đến máy ảnh là d1, và kích thước chiếu là ab; khoảng cách từ ô tô 2 đến máy ảnh là d2, và kích thước chiếu là cd. Theo nguyên lý hình học chiếu:
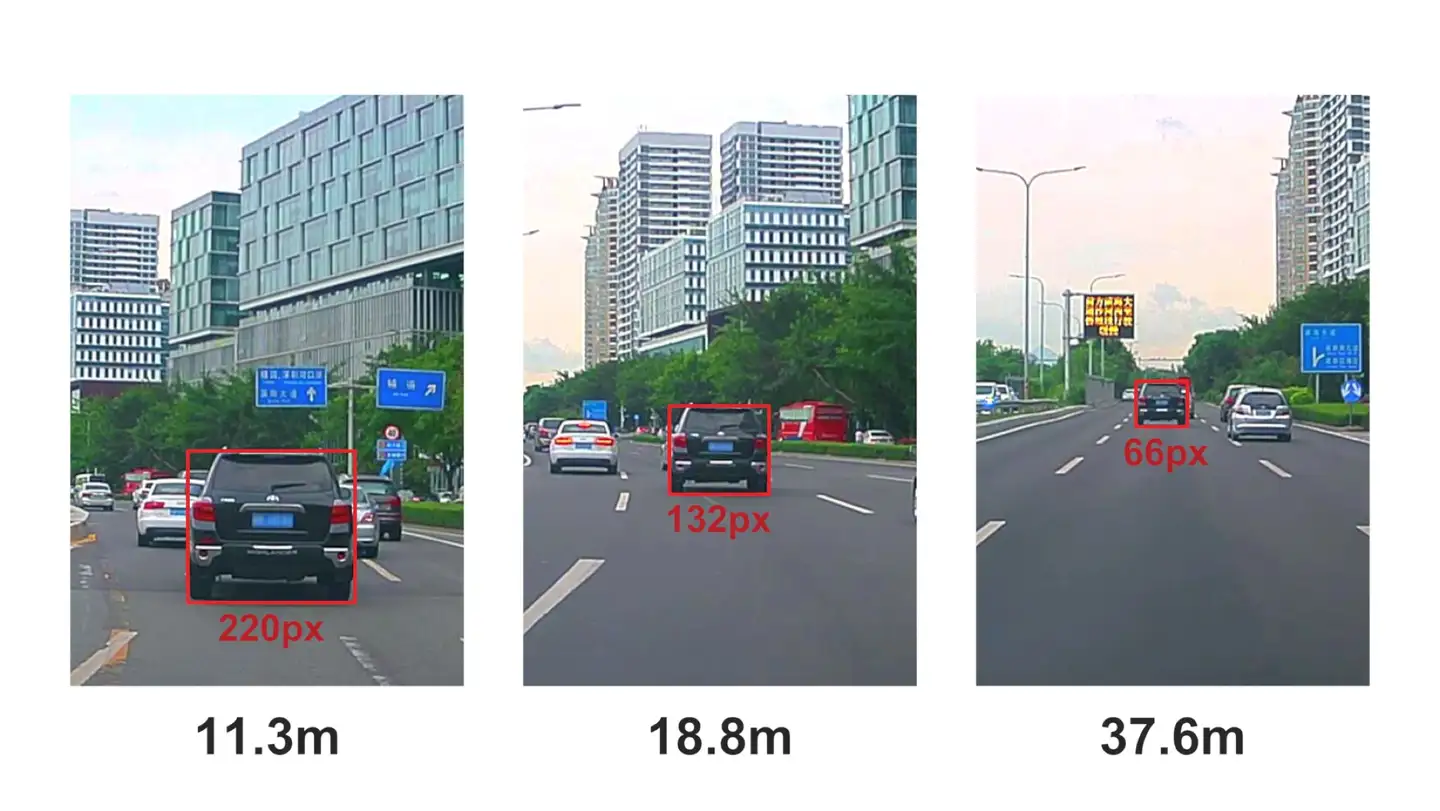
Ví dụ, nếu một chiếc ô tô cách chúng ta 11,3 mét, thì chiều rộng của nó trên khung ảnh là 220 pixel.
Khi nó cách chúng ta 18,8 mét, nó có chiều rộng 132 pixel trên khung ảnh. Và cứ như vậy.
Qua tính toán và phân tích chính xác, khi chúng ta biết bao nhiêu pixel một chiếc ô tô chiếm trong bức ảnh, chúng ta có thể đoán ngược khoảng cách của nó.
Áp dụng phương pháp này cho mỗi đối tượng được phát hiện bởi mạng nơ-ron tích chập, chúng ta có thể biết được khoảng cách của tất cả các phương tiện phía trước.

Trên cơ sở này, chúng tôi theo dõi mỗi phương tiện phía trước với tần suất 30 khung hình mỗi giây, như được hiển thị trong hình sau:
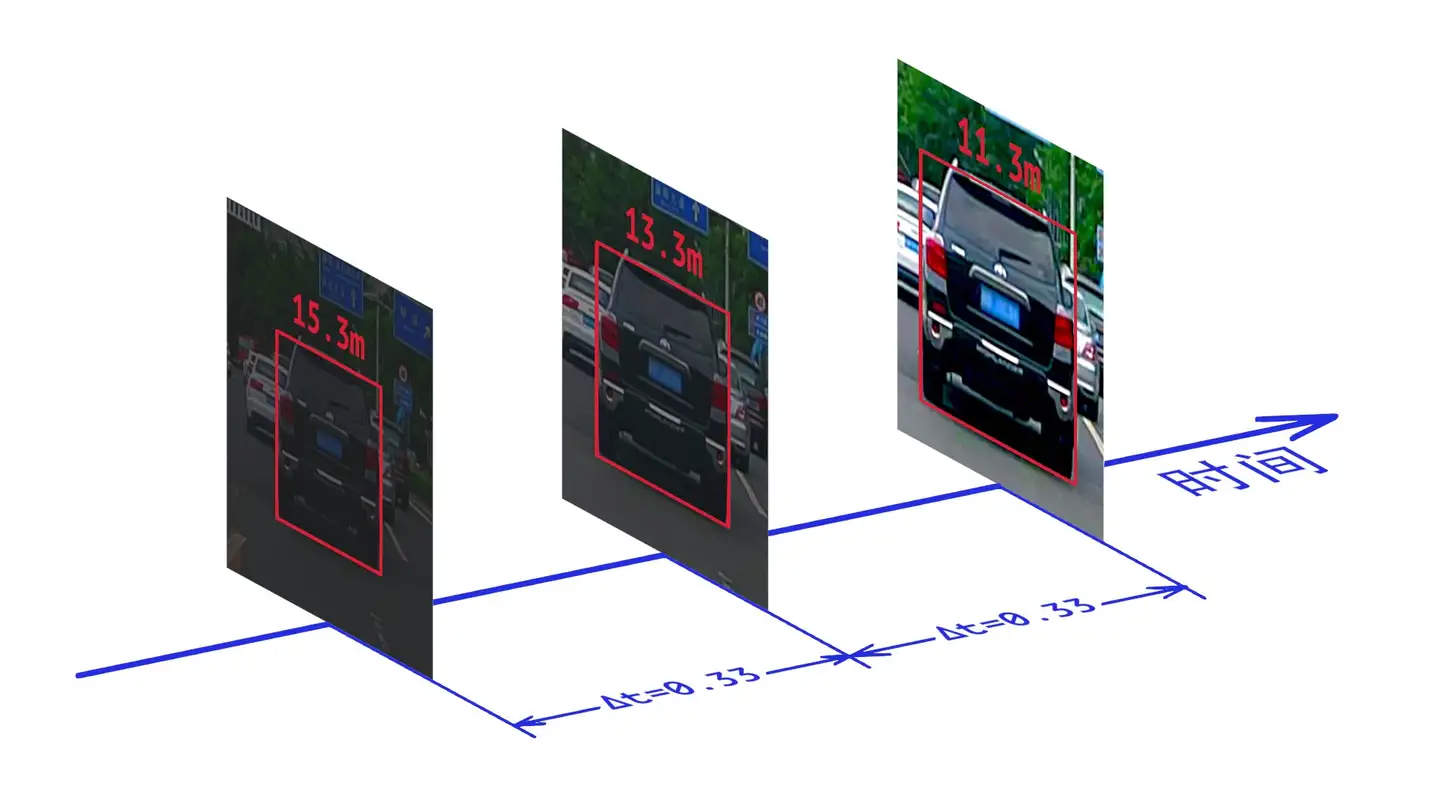
Phương tiện trong hình đang ngày càng gần chúng tôi. Giả sử khoảng thời gian giữa hai khung hình trước và sau là Δt = 0,33 giây, và sự thay đổi khoảng cách giữa hai khung hình là Δs = 2,0m, tốc độ tương đối của phương tiện phía trước có thể được tính toán theo công thức sau:
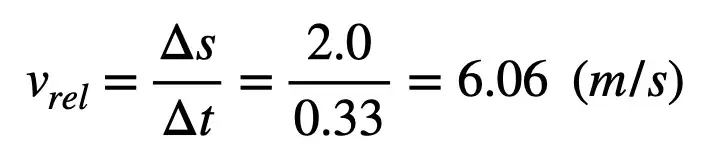
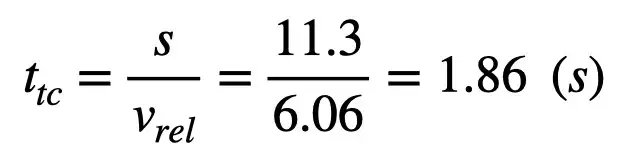
Biết khoảng cách và tốc độ tương đối, ta có thể sử dụng công thức sau để tính toán thời gian có thể xảy ra va chạm (Thời gian đến va chạm):
Bước 3: Quyết định(Decision Making).
Quyết định là đánh giá mức độ nguy hiểm của vật thể phía trước tại thời điểm hiện tại và quyết định xem có cần đưa ra cảnh báo hay không.
Trong bước trước đó, chúng ta đã tính toán được vị trí tương đối và thời gian va chạm của tất cả các phương tiện phía trước:

Bây giờ chúng ta có thể xếp hạng mức độ nguy hiểm của chúng. Ví dụ, mức độ nguy hiểm của các phương tiện trong làn đường hiện tại thường cao hơn so với các phương tiện trong làn đường kế tiếp. Càng ngắn thời gian va chạm của các phương tiện trong cùng làn đường, mức độ nguy hiểm càng cao.
Sau khi xếp hạng, tìm phương tiện hoặc người đi bộ nguy hiểm nhất đối với chúng ta, đưa thông tin này ra màn hình, và kích hoạt phản ứng cảnh báo khi khoảng cách giữa các phương tiện hoặc thời gian va chạm nhỏ hơn một ngưỡng nhất định.

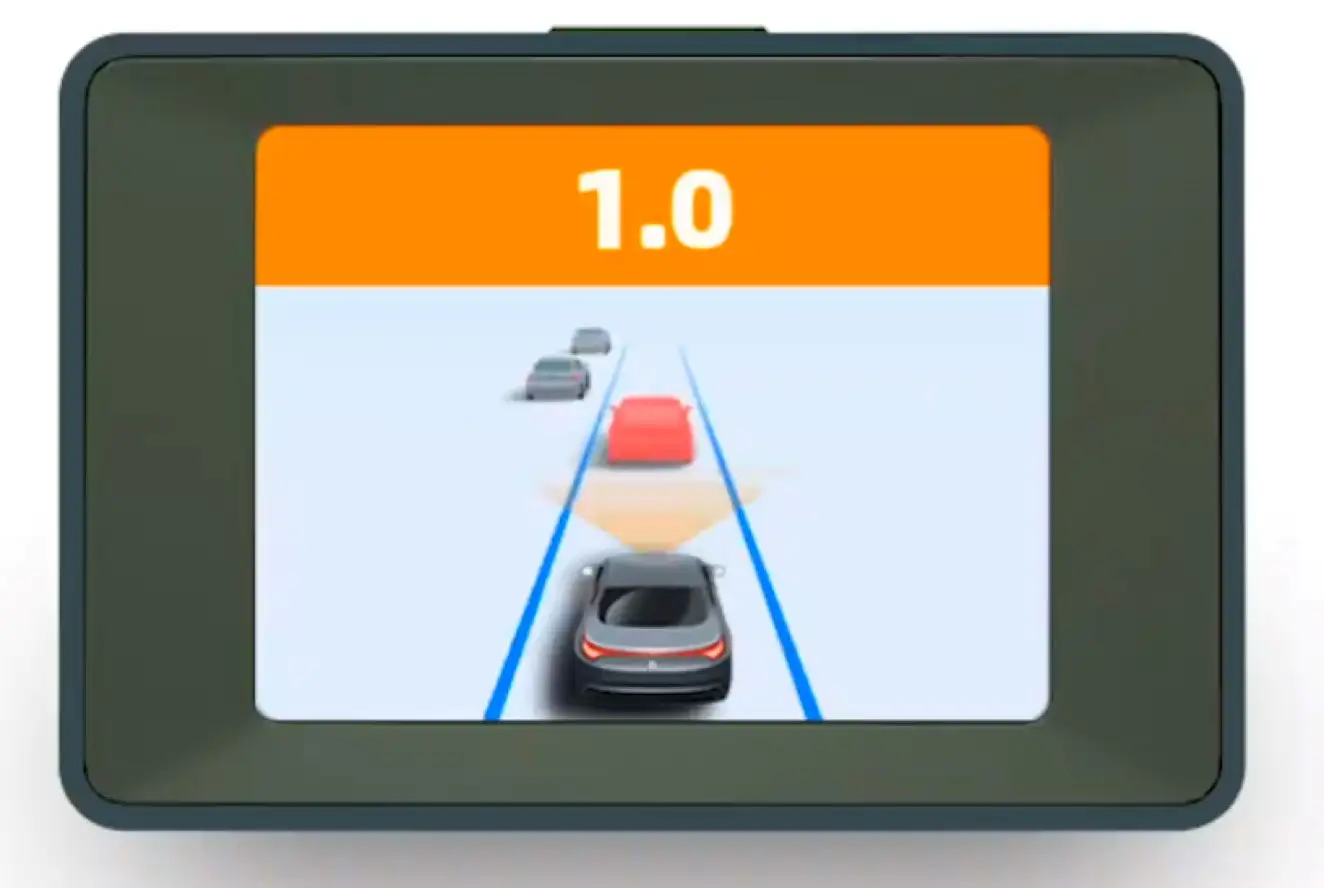
Số trên khu vực hiển thị đại diện cho hệ số an toàn của phương tiện phía trước trực tiếp. Số càng thấp thì càng nguy hiểm hơn.
Bước 4: Cảnh báo(Warning).
Khi nguy cơ đạt đến một ngưỡng nhất định, văn bản nền màu đỏ "Cảnh báo: Va chạm" sẽ xuất hiện trên màn hình.
Camera cảnh báo va chạm UTOUR AI C2L/C2M cũng sẽ phát ra âm thanh cảnh báo nhanh "Dididi", nhắc nhở tài xế giảm tốc độ và tránh va chạm.

Trên đây là nguyên tắc hoạt động cơ bản của thiết bị cảnh báo va chạm AI, tôi hy vọng nó có thể giúp ích phần nào cho việc mọi người hiểu và sử dụng thiết bị chống va chạm UTOUR AI.